
Enabling Scalable Emergency Response Drone Charging
How Skycharge removed the battery bottleneck to enable scalable drone operations at ArcherFRS

ArcherFRS ground control hubs with integrated Skycharge charging system and docking platform
Client Overview
Archer First Response Systems (AFRS) is redefining emergency response by deploying drones that deliver life-saving equipment—such as AEDs, Narcan, and blood units—within minutes of a 911 call.
But in real-world operations, autonomy doesn’t fail in the air. It breaks on the ground.
Not because drones can’t fly. But because systems struggle to stay operational continuously.
The Operational Bottleneck
ArcherFRS initially relied on a standard operational model: drones returned to their hangar, where batteries and medical payloads were manually replaced after each mission.
This created a clear operational constraint:
More drones required more battery handling operations
Battery readiness depended on continuous human intervention
Scaling geographically meant increasing operational complexity and trained personnel
In a system designed for 24/7 emergency response, this quickly becomes unsustainable.
The bottleneck wasn’t flight. It was energy management as a manual process.
The Shift: Removing Battery Operations from the Workflow
Originally, maintaining system readiness required continuous manual battery handling—after each mission and across daily operations.
This created a simple equation:
More drones = more battery operations
→ requiring trained personnel to keep the system running
With Skycharge integrated into both the hangar (Charge Source) and the drone (Charge Sink), that layer is removed from daily operations.
Drones now land and recharge automatically upon contact—directly onboard.
No battery swaps
No manual battery handling
No need for trained personnel to manage charging
This does not eliminate human involvement.
Medical personnel still handle payloads (e.g. AEDs). Operations still exist. But the system no longer depends on specialized technical intervention to remain operational.
What Actually Changes
This is not about full autonomy. It is about removing a specific operational constraint.
Before:
System uptime depended on trained personnel managing batteries
Energy was an external workflow
Operations scaled with technical staffing
After:
System maintains charge state automatically
Energy becomes embedded in the infrastructure
No dedicated battery workflows required
The result: The system stays operational without relying on continuous, trained battery management.

Infrastructure-Level Capability
This shift is enabled by infrastructure—not by adding more operational layers.
Key characteristics:
Passive docking with no moving parts → higher reliability vs mechanical systems
Charging triggered by physical contact → no commands or software dependency
Robust outdoor operation → including harsh and wet environments
Instant docking/undocking → no delay between missions
Charging is no longer a task. It becomes a property of the system.
From Linear Operations to Scalable Deployment
This change fundamentally alters how the system scales.
Before:
Each additional drone increased battery operations
More drones required more trained personnel
Operational complexity grew linearly
After:
Battery management is no longer an operational task
Additional drones do not introduce proportional battery workload
Scaling is no longer constrained by energy-related human intervention
The system shifts:
From a model dependent on trained operations
To a model supported by infrastructure
Infrastructure That Scales Across Fleets
A critical enabler of this model is interoperability.
Skycharge integrates across different drone platforms without requiring redesign or vendor lock-in.
This allows operators to:
Deploy standardized infrastructure across locations
Integrate new drone models without reengineering charging systems
Maintain consistency as fleets evolve
Charging becomes part of the ground infrastructure layer—not a constraint tied to individual platforms.
Real-World Deployment
This is already deployed in the field:
Integrated on Freefly Alta X heavy-lift drones
5 units operating continuously
Expansion underway to increase fleet size and coverage
This is not a pilot. It is an active production deployment.
Why This Matters
In autonomous drone systems, scale is not limited by flight capability.
It is limited by operational dependencies.
To scale effectively, infrastructure must:
Reduce reliance on trained technical intervention
Minimize operational complexity
Remain consistent across platforms
Enable immediate readiness
Skycharge addresses one of the most critical constraints:
Removing battery management as an operational dependency.
Conclusion
By integrating Skycharge, ArcherFRS didn’t automate their entire system. They removed one of its most limiting operational constraints. Battery management is no longer a task performed by people.
It is handled by infrastructure. From a system dependent on trained intervention To a system that remains operational by design.
Custom Docking Platform
Circular and modular tile surface made of 9 steel-made, anti-glare treated, conductive tiles ensuring 400 mm landing error tolerance
Slight incline for rainwater drainage
Non-conductive central pad for safe access
Non-slip platform edge for walkable safety
Charging System
Charge Source 1500W
Included in-rush current limiter for safe and reliable pre-charging
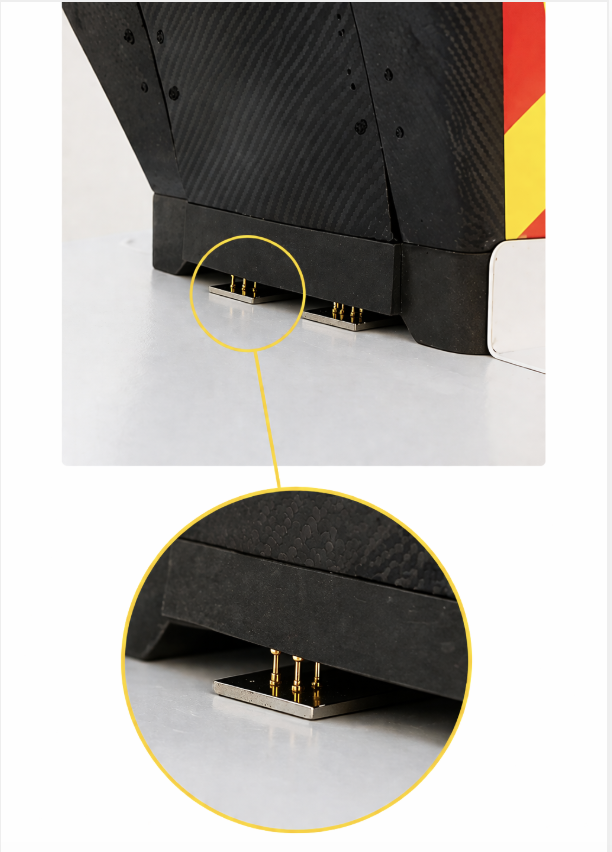
Onboard Integration
Charge Sink LIGHT circuit logic implemented inside the Avy Aera drone PCB design
Spring-loaded contacts integrated into Avy Aera airframe
Added weight: ~10 grams